Spectre
The Deported
- Joined
- Feb 1, 2007
- Messages
- 36,832
- Location
- Dallas, Texas
- Car(s)
- 00 4Runner | 02 919 | 87 XJ6 | 86 CB700SC
An update from here: Uber Disabled Volvo SUV's Safety System Before Fatality - The NTSB has released its report. More pics and links at source.
https://www.nbcnews.com/tech/tech-news/self-driving-uber-car-hit-killed-woman-did-not-recognize-n1079281
Self-driving Uber car that hit and killed woman did not recognize that pedestrians jaywalk
The automated car lacked "the capability to classify an object as a pedestrian unless that object was near a crosswalk," an NTSB report said.
A self-driving Uber car that struck and killed an Arizona woman was not able to recognize that pedestrians jaywalk, the National Traffic Safety Board revealed in documents released earlier this week.
Elaine Herzberg, 49, died after she was hit in March 2018 by a Volvo SUV, which had an operator in the driver's seat and was traveling at about 40 miles per hour in autonomous mode at night in Tempe.
The fatal accident came as a result of this automated Uber not having "the capability to classify an object as a pedestrian unless that object was near a crosswalk," one of the NTSB documents said.
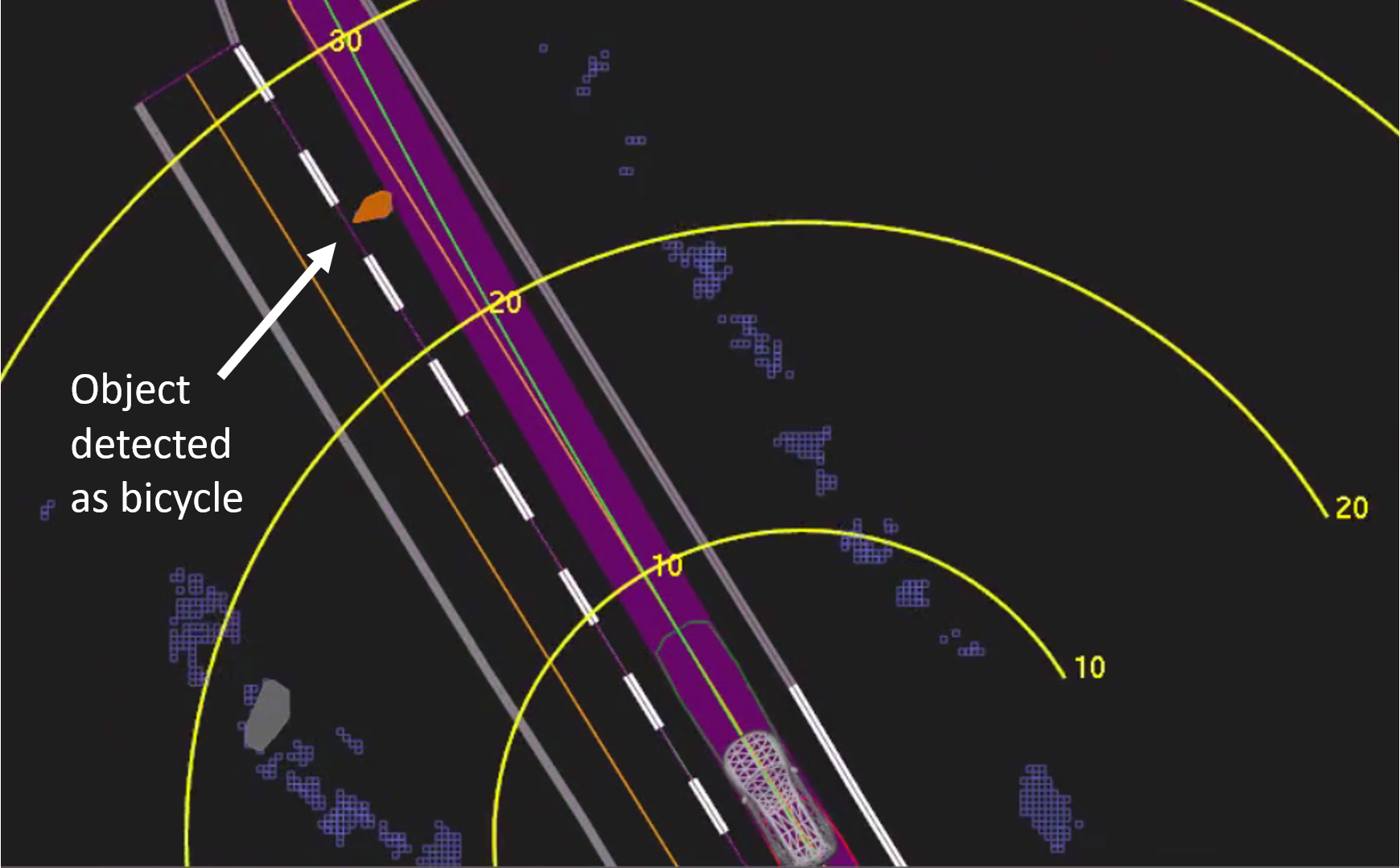
Because the car could not recognize Herzberg as a pedestrian or person — instead alternating between classifications of "vehicle, bicycle, and an other" — it could not correctly predict her path and concluded it needed to brake just 1.3 seconds before it struck her as she wheeled her bicycle across the street a little before 10 p.m. at night.
Uber told the NTSB that it "has since modified its programming to include jaywalkers among its recognized objects," but other concerns were also expressed in NTSB's report.
Uber had disabled the emergency braking system, relying on the driver to stop in this situation, but the system was not designed to alert the operator, who only "intervened less than a second before impact by engaging the steering wheel," the documents said.
That safety driver was working alone — a recent change in procedure — and didn't keep her eyes on the road, the report said. She was streaming the television show "The Voice," according to a police report cited by NBC Philadelphia.
The NTSB also noted that Uber's Advanced Technologies Group had a technical system safety team in place, but failed to "have a standalone operational safety division or safety manager." The company also "did not have a formal safety plan, a standardized operations procedure (SOP) or guiding document for safety."
Sarah Abboud, an Uber spokeswoman, told Reuters that the company regretted the crash, but said Uber's automated program has “adopted critical program improvements to further prioritize safety. We deeply value the thoroughness of the NTSB’s investigation into the crash and look forward to reviewing their recommendations.”
Between September 2016 and March 2018, Uber's test vehicles were involved in 37 crashes while driving autonomously, but only two were as a result of a car's failure to identify a roadway hazard.
Herzberg's family settled with Uber out of court.
Uber announced it had relaunched its self-driving cars nine months after the accident.
https://www.nbcnews.com/tech/tech-news/self-driving-uber-car-hit-killed-woman-did-not-recognize-n1079281
- What idiot programmed this?????
- Holy crap, Uber's ATC is a bunch of idiots.